

DK4-BZ-002
Guhêrbarê Mîkro 3Pin SPDT Guhêrbarê Sînorê Mini 10A 250VAC Leverê Arc a Roller Snap Action Push Guhêrbarên Mîkro
| (Taybetmendiyên diyarkirî yên operasyonê) | (Parametreya Xebitandinê) | (Kinkirî) | (Yekîneyên) |
|
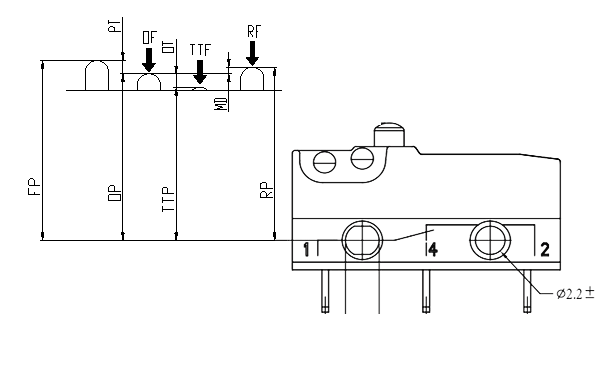
| (Pozîsyona Azad) | FP | mm |
| (Pozîsyona Xebatê) | OP | mm | |
| (Radestkirina Pozîsyonê) | RP | mm | |
| (Pozîsyona Tevahî ya Rêwîtiyê) | TTP | mm | |
| (Hêza Operasyonê) | OF | N | |
| (Hêza Berdanê) | RF | N | |
| (Hêza Tevahî ya Rêwîtiyê) | TTF | N | |
| (Berî rêwîtiyê) | PT | mm | |
| (Ser rêwîtiyê) | OT | mm | |
| (Cûdahiya Tevgerê) | MD | mm |
Taybetmendiyên Teknîkî yên Guhestinê
| (ŞANÎ) | (Parametreyên teknîkî) | (Giranî) | |
| 1 | (Nirxandina Elektrîkê) | 10(1.5)A 250VAC | |
| 2 | (Berxwedana Têkiliyê) | ≤50mΩ (Nirxa destpêkê) | |
| 3 | (Berxwedana Îzolasyonê) | ≥100MΩ(500VDC) | |
| 4 | (Voltaja Dîelektrîkî) | (di navbera termînalên ne-girêdayî de) | 500V/0.5mA/60S |
| (di navbera termînalan û çarçoveya metalî de) | 1500V/0.5mA/60S | ||
| 5 | (Jiyana Elektrîkî) | ≥10000 çerx | |
| 6 | (Jiyana Mekanîkî) | ≥3000000 çerx | |
| 7 | (Germahiya Xebatê) | -25~105℃ | |
| 8 | (Frekansa Xebatê) | (elektrîkî): 15çerx(Mekanîkî): 60çerx | |
| 9 | (Berxwedêrê Lerizînê) | (Frekansa Lerizînê): 10~55HZ; (Amplîtûd): 1.5mm; (Sê alî): 1H | |
| 10 | (Qabiliyeta Lehimkirinê): (Ji %80 zêdetir beşa binavbûyî dê bi lehimkirinê were nixumandin) | (Germahiya Lehimkirinê): 235±5℃ (Dema Binavkirinê): 2~3S | |
| 11 | (Berxwedana Germahiyê ya Lehimkirinê) | (Lehimandina Bi Destan): 260±5℃ 5±1S (Lehimandina Destan): 300±5℃ 2~3S | |
| 12 | (Piştrastkirinên Ewlehiyê) | UL, CSA, TUV, ENEC | |
| 13 | (Şert û mercên ceribandinê) | (Germahiya Jîngehê): 20±5℃ (Şiliya Nisbî): 65±5%RH (Zexta Hewayê): 86~106KPa | |
Analîza herikîna xebitandinê ya giştî ya mîkroguhêzê
Pêvajoya xebitandinê ya giştî ya mîkro guhêrbarê bi berfirehî tê vegotin:
①Zexta xebitandinê ya OF: Ew li bişkok an aktûatorê tê zêdekirin da ku guhêrbar hêza herî zêde ya pêwîst ji bo çalakiya pêş (girêdan an qutkirina devreyê) hilberîne.
②Hêza xebitandina berevajî RF: Hêza herî kêm ku bişkok an aktuator dikare hilgire dema ku guhêrbar berevajî ye (qetandî an girêdayî çerxerêyê ye).
③Zexta têkiliyê TF: Zexta xala têkiliyê ya statîk dema ku bişkok an beşa aktuatorê di pozîsyona azad de ye, an jî zexta xala têkiliyê ya dînamîk dema ku beşa aktuatorê ya bişkokê di pozîsyona sînor de ye.
④Pozîsyona Azad FP: Pozîsyona ji xala herî bilind a bişkok an aktûatorê heta xeta bingehîn a qulika montajkirina guhêrbar dema ku guhêrbar di rewşa normal de ye û ne di bin bandora hêza derveyî de ye.
⑤Pozîsyona xebitandinê OP: Dema ku bişkoka guhêrbar an jî pêkhateya aktûatorê di çalakiyek erênî de be, pozîsyona ji xala herî bilind a bişkok an jî pêkhateya aktûatorê heta xeta bingehîn a qulika montajkirina guhêrbarê ye.
⑥ Pozîsyona RP vegerîne: Dema ku bişkoka guhêrbar an jî pêkhateya aktûatorê di çalakiya berevajî de ye, pozîsyon ji xala herî bilind a bişkok an jî pêkhateya aktûatorê heta xeta bingehîn a qulika montajkirina guhêrbarê.
⑦Tevahiya tevgera TTP: Herî zêde pozîsyona ku bişkoka guhêrbar an jî pêkhateya aktuatorê dema ku dixebite dikare bihêle ku biçe.
⑧ Lêdana Çalakiyê PT: Dûrahiya herî zêde ji pozîsyona azad a bişkoka guhêrbar an aktuatorê heta pozîsyona çalakiya erênî.
⑨ Rêwîtiya zêdekirinê OT: Bişkoka guhêrbar an jî pêkhateya aktûatorê ji pozîsyona çalakiya erênî ber bi jêr ve diçe, û dûrahiya heta pozîsyona sînor a ku performansa mekanîkî ya guhêrbarê bi dawî nake an jî zirarê nade, bi gelemperî nirxa herî kêm digire.





